Plugin NSK_pi
Features
The plugin provides a simple converter of NMEA 0183 messages to Signal K delta messages.
The main purpose of this plugin is to serve as a companion to the DashboardSK plugin in systems where Signal K data is not normally available. A real Signal K server does and always will provide a much richer feature set and is the preferable way to integrate the onboard systems and serve the data to OpenCPN, it’s DashboardSK plugin or any other client.
Installation
-
Open the OpenCPN
Toolboxby clicking on the cogwheel icon in the main toolbar -
Navigate to the
Pluginstab -
Update the plugin catalog using the button on the bottom
-
Find the
NSK`tile in the list of available plugins and click on it -
In the presented dialog click the
Installbutton
Once the plugin is enabled, it immediately starts converting all the NMEA 0183 sentences it knows to Signal K delta messages and passes them to the OpenCPN core application where they are forwarded to other plugins.
Configuration
-
To access the plugin’s statistics and preferences dialog, navigate to the
Plugins`tab in the `Toolbox, select theNSKand click on thePreferencesbutton.
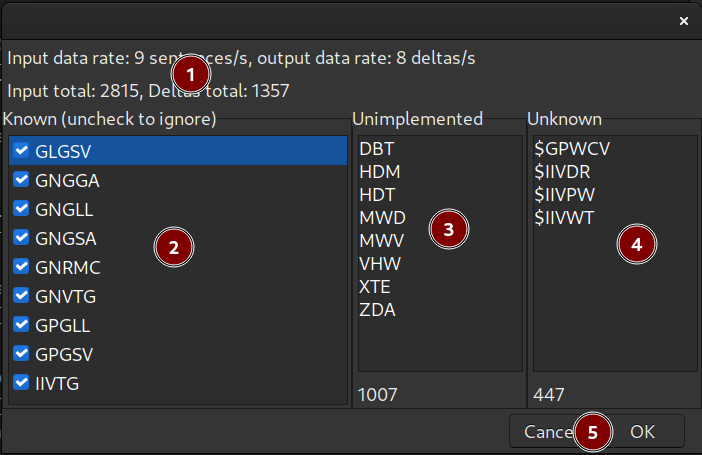
The dialog offers a basic performance statistics and allows disabling conversion for some of the sentences delivered in the NMEA 0183 data feed.
-
Performance statistics
-
Known NMEA 0183 sentences being converted to Signal K deltas. Uncheck the checkbox to stop converting the particular message.
-
NMEA 0183 sentences present in the feed, known to the MarNav library, but not yet implemented by the NSK plugin
-
NMEA 0183 sentences not recognized by the MarNav library
-
If you click the
OKbutton, the settings for the sentences are persisted. OnCancelthe configuration is reverted to it’s previous state.
Extending the plugin
The primary goal of this plugin is to be as simple as possible both for the user and for anybody willing to extend it’s capabilities. A converter for an NMEA 0183 sentence is as simple as
void NSK::ProcessSentence(std::unique_ptr<marnav::nmea::gll> s,
rapidjson::Value& values_array,
rapidjson::Document::AllocatorType& allocator)
{
Value val(kObjectType);
Value pos(kObjectType);
if (s->get_lat().has_value() && s->get_lon().has_value()) {
pos.AddMember("latitude", s->get_lat()->get(), allocator);
pos.AddMember("longitude", s->get_lon()->get(), allocator);
val.AddMember("path", "navigation.position", allocator);
val.AddMember("value", pos, allocator);
values_array.PushBack(val, allocator);
}
}More information about extending the plugin can be found in it’s source code repository.
Credits
This plugin would not be possible without Mario Konrad’s excellent MarNav library doing the dirty work of parsing the NMEA 0183 sentences.
Links
-
Github project: https://github.com/nohal/nsk_pi
-
Forum: OpenCPN support forum