Windvane Autopilot
Developer: Jon Gough
Links
-
Forum: Windvane Thread
Summary
This plugin is for those that have older style auto pilots that have simplistic inputs/outputs and whose yachts are not suitable for normal windvane autopilots. This plugin uses the wind instruments that OpenCPN can see, i.e. the ones that allow the display of wind direction and speed, to control the standard autopilot. This is done by using the APB and RMB NMEA 0183 sentences. In this case the plugin creates new versions of the sentences with a prefix of “WV” so that it can be easily used. When this plugin is installed both the WVAPB and WVRMB sentences will be produced irrespective of whether the plugin is being used. If the plugin is not being used the APB and RMB sentences are the same as normally generated, but if the plugin is being used then the APB and RMB sentences are modified to make the autopilot follow the wind changes. This makes the setup of the connections filtering easier.
Installation
-
Install and Enable these plugins now: Instructions
Use
When the plugin is enabled it will show,
in the OpenCPN toolbar. This tool will not activate unless there is wind, gps and heading information being provided to OpenCPN. You will get a warning dialog:
If there is wind, gps and heading information being supplied you will activate the main autopilot dialog:
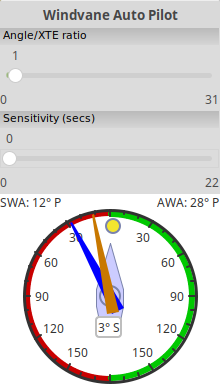
'This will show you the current 'aggresiveness' to follow the required Angle by modifying the amount of virtual XTE is being sent to the autopilot and the 'sensitivity' to variations in wind direction. These sliders are used to control how much rudder to put in when the wind direction is not as required and how many seconds to average the wind direction over.
The dial part of the diagram shows the Smoothed Wind Angle (SWA) as a number and graphically as the brown pointer. It shows the current Apparent Wind Angle (AWA) as a number and graphically as a blue pointer. The final item is the yellow 'bug'. This is used to set the desired wind angle. When the WV icon is pressed the bug is set to the current wind angle. If this angle needs to be changed it can be dragged with the left mouse button held down. The number in the middle of the dial shows the numeric number of degrees from straight ahead that the bug is set too.
It should be very easy to use, although it may take a little trial and error to get the Angle/XTE and Sensitivity settings correct for your yacht. Each sailing day is different so the settings may/will need adjusting for the current conditions to get the desired result.
Clicking on the WV icon in the OpenCPN tool bar when the dialog is shown will turn off the autopilot and the normal route following messages will start to flow to the autopilot.
Setup
There are two items that have to be setup to make this work
-
The filtering of the messages from OpenCPN to the autopilot. You will need to filter the 'ECAPB' and 'ECRMB' messages so that they do not get transmitted. You need to ensure the 'WVAPB' and 'WVRMB' messages are being sent instead.
-
The default setting to use for the plugin. These are setup in the Windvane Preferences.
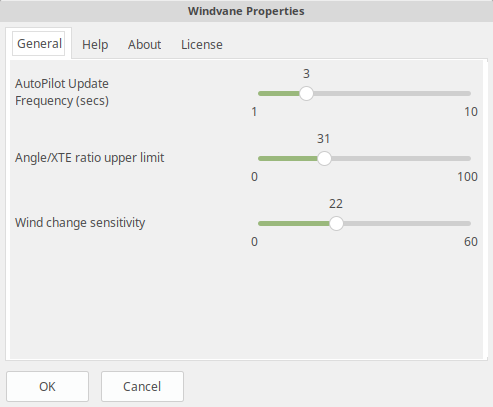
AutoPilot Update Frequency (Secs)
This is the default time between sending messages to the autopilot. If your autopilot wants them every 5 seconds there is no point in sending these every second, it just slows the whole system down. So this setting is dependent on the way your autopilot works.
Angle/XTE ratio upper limit
This sets the length of the slider in the active Windvane Autopilot dialog. This may take a bit of trial and error to determine what works best for your yacht. The higher the number the more aggressively the plugin will get in telling your autopilot how far off course you are. Autopilots often ignore small XTE errors and only start to modify direction when they get past a certain, internal limit. They will have algorithms that determine how aggressively to keep on a given route. This setting allows the plugin to handle the depending on conditions.
Wind change sensitivity
This sets the maximum time over which to smooth the wind direction. This normally needs to be set to a sufficient time to allow for wave/swell action and boat reaction to wind changes. If the number is too big it makes setting the correct value on the Windvane Autopilot dialog more difficult as the slider will only need to be moved a very small distance to change values.