TwoCan

by Steven Adler [Stevead]
Inspired by Canboat and Openskipper, frustrated by those who claim “OpenCPN is not a hardware experimenter’s platform”, and desiring to give back something to the OpenCPN community.
TwoCan - An OpenCPN Plugin for integrating OpenCPN with NMEA2000® networks. It enables some NMEA2000® data to be directly integrated with OpenCPN by converting some NMEA2000® messages to NMEA 183 sentences and inserting them into the OpenCPN data stream. TwoCan support Windows, Linux (including RaspberryPi) and Mac OSX.
For Windows it uses a “plug-in” driver model to support different CAN
bus adapters and different log file formats.
Four hardware adapters are currently supported:
Five log file formats are currently supported (with examples of their file format):
-
TwoCan: 0x01,0x01,0xF8,0x09,0x64,0xD9,0xDF,0x19,0xC7,0xB9,0x0A,0x04
-
Candump (Linux utilty): (1542794025.315691) can0 1DEFFF03#A00FE59856050404
-
Kees Verruijt’s Canboat: 2014-08-14T19:00:00.042,3,128267,1,255,8,0B,F5,0D,8D,24,01,00,00
-
Yacht Devices: 19:07:47.607 R 0DF80503 00 2B 2D 9E 44 5A A0 A1
-
PCAP packet Capture (eg. Wireshark):binary format, refer to https://tools.ietf.org/id/draft-gharris-opsawg-pcap-00.html
For Windows, the default file name for each of the input log files are: twocanraw.log, candump.log, kees.log and yachtdevices.log and twocan.pcap respectively.
For Linux it does not use a “plug-in” driver model, rather it uses three “baked in” classes that support the SocketCAN interface, PCAP packet capture format and a generic Log File Reader. Any CAN bus adapter that supports the SocketCAN interface “should” work. It has been tested with native interfaces (eg. can0), serial interfaces (eg. slcan0) and virtual interfaces (eg. vcan0).
Several hardware adapters have been successfully tested under Linux:
-
Canable Cantact - (see above)
-
Rusoku Toucan Marine (see above)
-
Waveshare CAN Hat for Raspberry PI - https://www.waveshare.com/rs485-can-hat.htm
-
USBTin - USBTin
-
Copperhill Tech PICAN-M for Raspberry Pi - https://copperhilltech.com/pican-m-nmea-0183-nmea-2000-hat-for-raspberry-pi/
A good reference to using & configuring the CAN interfaces on Linux can be found at: https://elinux.org/Bringing_CAN_interface_up
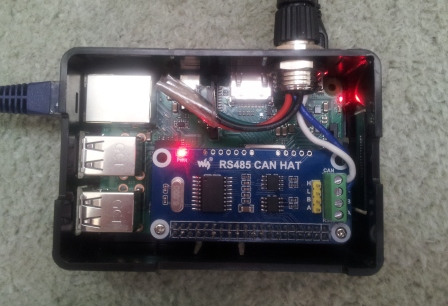
Above, a Raspberry Pi with Waveshare CAN Hat installed.
The Linux Log File Reader automagically™ detects the four supported log file formats. The default file name for the input log file is twocan.log. The PCAP packet capture log reader default file name is twocan.pcap
Similarly the Mac OSX version uses five “baked in” classes, one supporting the generic Log File reader, one supprting the PCAP packet capture format, one supporting the Rusoku Toucan adapter (see above), one supporting the Kvaser Leaf Light adapter (see above) and the other supporting serial USB CAN bus adapters such as the Canable Cantact (also see above).
It seems as though the same command set is used by adapters that support the serial SocketCAN interface (SLCAN), so while the Mac OSX plugin’s Canable Cantact driver was developed purely for that device, it may also work with other serial USB Can bus adapters such as the USBTin (see above) and Lawicell adapters. The plugin automagically™ detects these three adapters using their respective USB Vendor Id’s and product Id’s and may work with serial USB devices other then the Canable Cantact.
NMEA 2000 frames may be logged by the plugin. By default they are written to the user’s home directory and named using the following convention: twocan-YYYY-MM-DD_HHmmSS.log
The TwoCan Plugin source code is available at https://github.com/TwoCanPlugIn/TwoCanPlugIn
The TwoCan Plugin Windows drivers are available at https://github.com/TwoCanPlugIn/TwoCanPluginDrivers == Aim
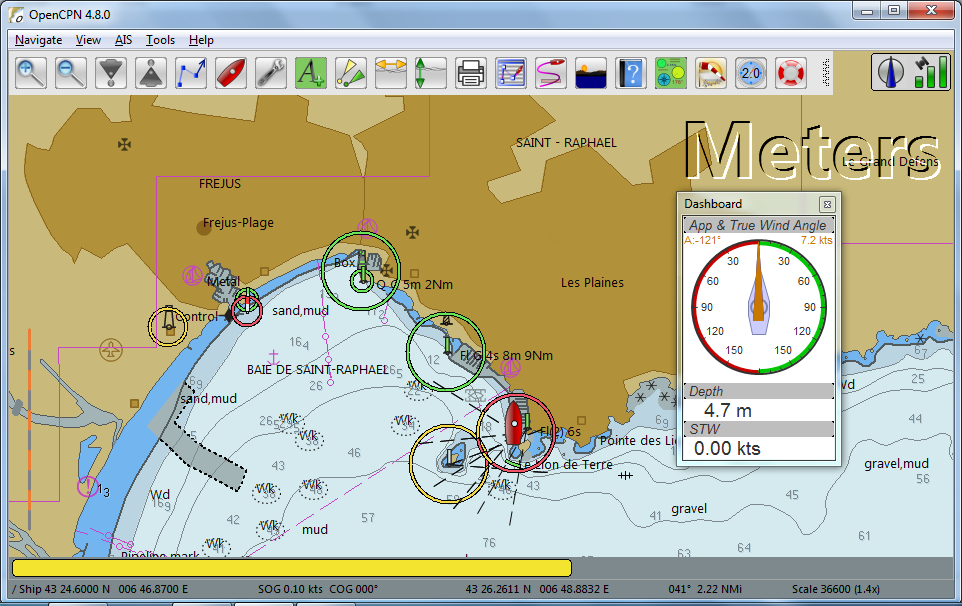
The aim of the TwoCan plugin is to allow OpenCPN to integrate with modern NMEA2000® networks and use the data directly from those sensors without relying on additional gateways or converters. Navigation data such as position, speed, depth, wind and time can be incorporated into OpenCPN without the need for feeding legacy NMEA 0183 data via serial communications or TCP/IP.
The plug-in supports Position, Speed, Depth. Wind, Time, AIS, DSC, Engine, Fluid Levels, Battery Status and Environmental (temperature, pressure, humidity etc.) data which is used directly by OpenCPN or by other plug-ins such as the Dashboard plug-in.
Installation
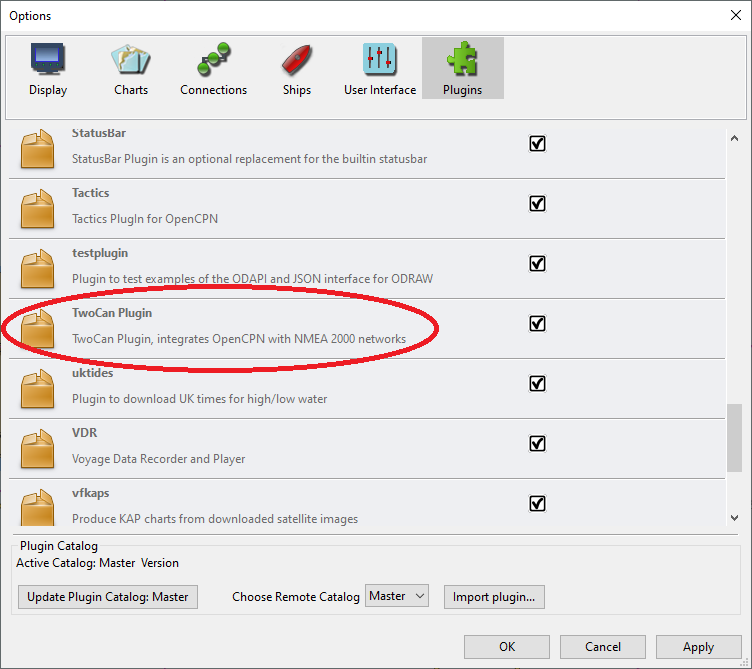
With version 1.9 and newer, the plugin is now directly supported by OpenCPN 5.2 and the Plugin Manager. Once you have updated your Master Catalogue, the plugin can be directly installed from the Plugin Manager.
For versions prior to 1.9
1. After compiling and creating the standalone installation package for TwoCan, use the resulting installer to install the TwoCan plugin.
2. If using Windows compile the TwoCan plugin drivers. At present they do not have an installation package so you must manually copy the drivers (Windows DLL’s) into the “twocan_pi\drivers” folder. This folder will be found in the “plugins” folder of your OpenCPN installation which in a default installation will be found in the “program files\opencpn” folder on your System drive.
For example on a standard Windows system it may be: “c:\program files\opencpn\plugins\twocan_pi\drivers”
Usage
1. Enable the TwoCan Plugin from the OpenCPN Options dialog.
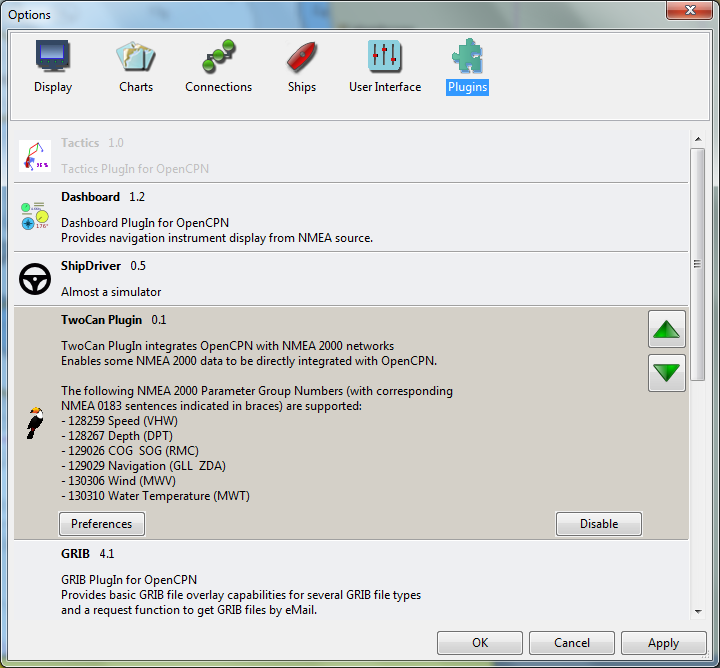
2, From the TwoCan Preferences dialog, use the Settings tab to select the appropriate driver from the drop down list, and select the required NMEA2000® PGN’s,
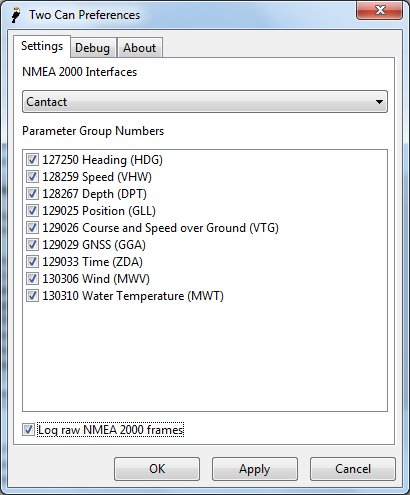
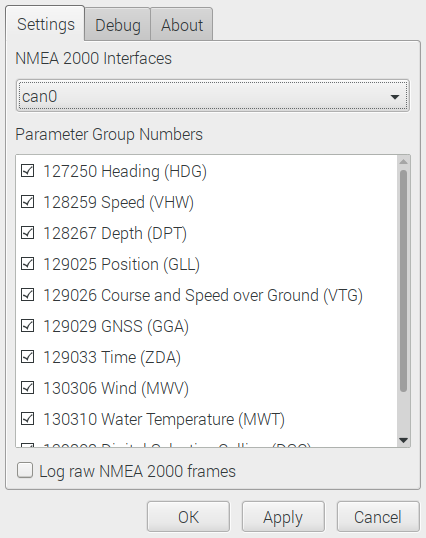
For Linux users, if any SocketCAN driver is installed, it will be displayed in the drop down list, together with the Log File Reader.
If using the hardware drivers you may log the raw data. At present the raw data is hard coded to write log files to the user’s home directory; for Windows usually the “My Documents” folder, for Linux and Mac OSX, “home” aka “~”
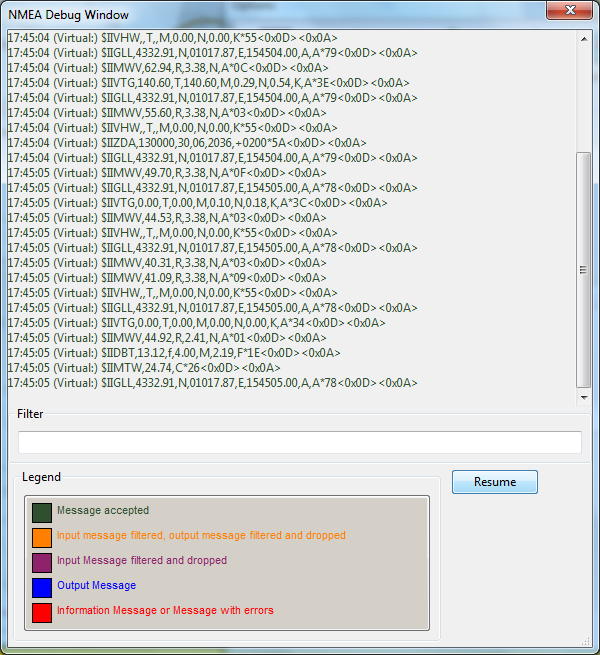
3. From the TwoCan Preferences dialog, you may use the Debug tab to observe the converted NMEA 0183 sentences in real time. Sentences may also be copied to the clipboard.
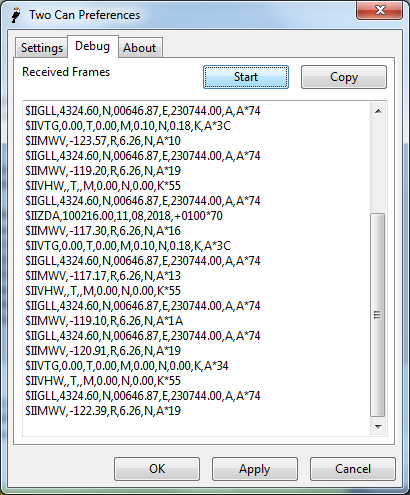
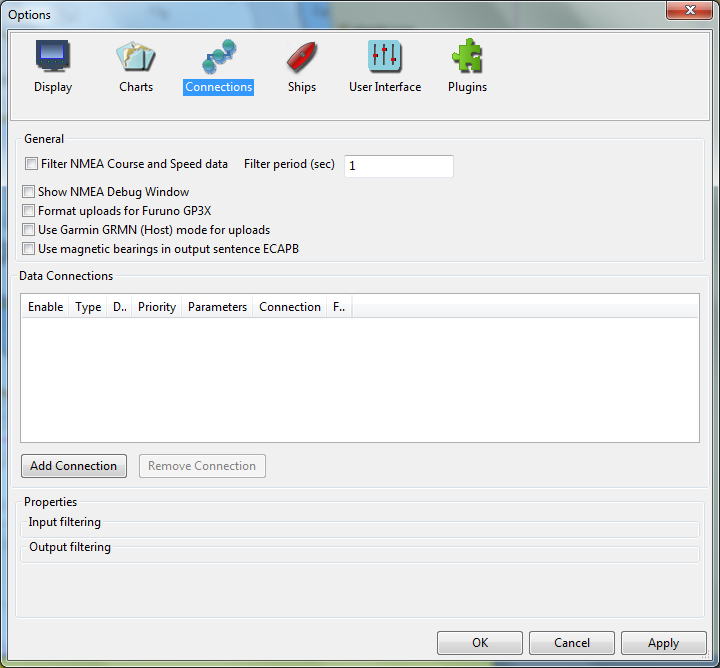
Note: The same sentences may also be viewed from OpenCPN if the “Show NMEA Debug Window” is selected from the OpenCPN Connection Settings dialog.
A new feature introduced with version 1.4 is the ability to enable TwoCan to participate on the NMEA 2000® network. The TwoCan plugn will acquire an address on the network and respond to a few network requests such as requests for address claims, device capabilities and product information. For the more technically minded, that means the Plugin supports the following Parameter Group Number (PGN’s): 59904 ISO Request, 60928 Address Claim, 126993 Heartbeat, 126996 Product Information.
This feature is confgured on an additional settings page.

In addition, the plugin attempts to build a “map” of the network by listing all of the active devices on the network and attempting to display their NMEA 2000® network address, manufacturer and model id.
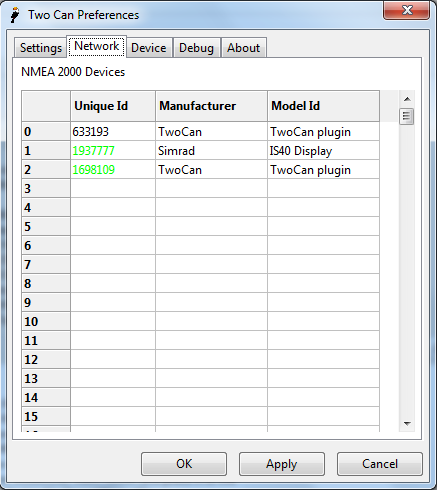
As the device responds to standard NMEA 2000® network requests, its presence is also displayed on third party NMEA 2000® display devices.
![]](_images/simrad-02.png)
Bi-Directional gateways
From version 2.0 onwards, TwoCan can operate as a bi-directional gateway, converting NMEA 183 sentences to their NMEA 2000 equivalents. The plugin receives NMEA 183 sentences from OpenCPN, converts them to NMEA 2000 and transmits them on the NMEA 2000 network. To determine what NMEA 183 sentences are converted, simply uncheck the corresponding PGN in the TwoCan options dialog. For example if you wish to convert depth data, enable the gateway feature and uncheck PGN 128267, which will then allow conversion of NMEA 183 DBT sentences to NMEA 2000 PGN 128267 messages.
Configuration Settings
The TwoCan plugin persists its configuration settings in the OpenCPN initialization file. Under Windows this file is named “opencpn.ini” and is located in the “ProgramData\OpenCPN ” folder. For Linux and Mac OSX users, the OpenCPN initialization file is located in the .opencpn directory in the user’s home directory.
For example:
[PlugIns/TwoCan]
PGN=511
Log=0
Adapter=C:\\Program
Files\\OpenCPN\\plugins\\twocan_pi\\drivers\\kvaser.dll
Mode=0
Problems
The TwoCan plugin has undergone very limited testing.
It has occasionally crashed OpenCPN, when changing drivers mid stream or selecting a driver for which the underlying hardware is not installed. In this case, manually edit the OpenCPN initializaion file and delete or correct the Adapter entry.
For Windows, the drivers that use serial communications (Canable Cantact and Axiomtek AX92903) both attempt to automagically determine their serial port settings but again this has undergone limited testing and may not work correctly.
For Linux, the CAN interfaces must be “up”. In general the “ifconfig” command can be used to determine the presence/state of the CAN adapters, and the “ip link” command can be used to bring up the interface. Eg. For a native interface the following command could be used: sudo ip link set up can0.
For Mac OSX the plugin automagically detects the serial USB port that the Canable Cantact device is connected to, whilst for the Rusoku Toucan and Kvaser Leaf Light devices the plugin also installs the necessary drivers which are based on the Mac-CAN libraries.
For diagnostic purposes, the plugin logs messages into the OpenCPN logfile,
For example:
4:52:40 PM: PlugInManager: Loading PlugIn: C:\Program
Files\OpenCPN\plugins\twocan_pi.dll
4:52:40 PM: C:\Program Files\OpenCPN\plugins\twocan_pi.dll
API Version detected: 108
PlugIn Version detected: 100
4:52:40 PM: TwoCan Device, Found driver C:\Program
Files\OpenCPN\plugins\twocan_pi\drivers\filedevice.dll
4:52:40 PM: TwoCan Device, Driver Manufacturer: TwoCan
4:52:40 PM: TwoCan Device, Driver Name: Logfile Reader
4:52:40 PM: TwoCan Device, Driver Version: 1.0
4:52:40 PM: TwoCan Device, Loaded driver C:\Program
Files\OpenCPN\plugins\twocan_pi\drivers\filedevice.dll
4:52:40 PM: TwoCan Plugin, TwoCan Device Initialized
4:52:40 PM: TwoCan Plugin, Create Device Thread Result: 0
4:52:40 PM: Changing NMEA Datasource for IIGLL to (Priority: 0)
4:52:40 PM: Changing NMEA Datasource for IIMWV to (Priority: 0)
4:52:40 PM: Changing NMEA Datasource for IIVHW to (Priority: 0)
4:52:40 PM: Changing NMEA Datasource for IIMTW to (Priority: 0)
4:52:40 PM: Changing NMEA Datasource for IIZDA to (Priority: 0)
4:52:40 PM: Changing NMEA Datasource for IIVTG to (Priority: 0)
4:52:40 PM: TwoCan Device, Driver Read result: 0
4:52:41 PM: Changing NMEA Datasource for IIGGA to (Priority: 0)
4:52:41 PM: Changing NMEA Datasource for IIDBT to (Priority: 0)
4:52:45 PM: PlugInManager: Deactivating PlugIn: C:\Program
Files\OpenCPN\plugins\twocan_pi.dll
4:52:45 PM: TwoCan Plugin, Device Thread Error Code: 0 Exit Code: 0
4:52:45 PM: opencpn::MyFrame exiting cleanly.
4:52:45 PM: Chart cache PlugIn purge
4:52:45 PM: PlugInManager: Deactivating PlugIn: C:\Program
Files\OpenCPN\plugins\twocan_pi.dll
4:52:45 PM: TwoCan Device, Read Thread terminating
4:52:45 PM: TwoCan Device, Driver Unload Result: 0
4:52:45 PM: Chart cache purge
4:52:45 PM: opencpn::MyApp starting exit.
4:52:45 PM: LOGBOOK: 2018-10-16 16:52:45 UTC OFF: Lat 43.41000 Lon
6.78117 COG 0.00000 SOG 0.00 kts
4:52:45 PM: opencpn::MyApp exiting cleanly…
Please report any errors to either the forum or via email to twocanplugin@hotmail.com
Trivia
Why the name “TwoCan” ? Firstly NMEA2000® is based on the Controller Area Network (CAN). Secondly, I recall that the Year 2000 rollover was sometimes referred to as Y2K and that Windows 2000 was sometimes referred to as Win2K, So simply a play on words: NMEA2000® is shortened to 2000 which becomes 2K which ends up as Two and when appended with CAN becomes TwoCAN. But more importantly, every software project needs a cool icon !
NMEA2000® is a registered Trademark of the National Marine Electronics Association.